
/k/ Aviones Episodio 93: Slavshit experimental
/K/ Planes

¡Es hora de otro episodio de /k/ Planes! En esta ocasión, analizaremos los diversos aviones experimentales que han salido de Rusia.
A pesar de las críticas generalizadas al régimen soviético, los soviéticos mostraron un gran entusiasmo por la aviación cuando llegaron al poder en la década de 1920. Además de un impulso general para desarrollar aviones de combate competitivos, organizaciones estatales como el Instituto Central de Aerohidrodinámica (TsAGI), el Instituto de Investigación de la Fuerza Aérea (NII VVS) y los institutos de aviación de Járkov y Moscú (KhAI y MAI) patrocinaron innumerables programas a lo largo de los años para investigar diseños menos convencionales. Sin embargo, a diferencia de muchos aviones experimentales extranjeros, los productos de estos programas experimentales a menudo estaban militarizados. Los elementos militarizados de los aviones experimentales no siempre eran prácticos, pero reflejaban el enfoque general del desarrollo aeronáutico soviético: el servicio militar. Durante la Guerra Fría, la línea entre demostrador tecnológico y prototipo se difuminó, y en muchos casos la única razón por la que un avión se consideraba "experimental" en lugar de prototipo era el hecho de que perdía frente a un proyecto competidor. Desafortunadamente, aunque el trabajo experimental continuó claramente después del final de la Guerra Fría, los detalles de muchos proyectos son difíciles de obtener debido al secretismo soviético. A primera vista, parece que el trabajo experimental a gran escala fue mucho menos prolífico que en organizaciones como la NASA, pero es muy posible que gran parte del trabajo permanezca en secreto.
Túpolev ANT-1
El primer avión de Andrei Tupolev se originó en 1911, pero el estallido de la Primera Guerra Mundial y la posterior guerra civil pospusieron el proyecto. Afortunadamente, Tupolev se unió al departamento de diseño de TsAGI una vez que se calmó la situación, y para 1922 su primer diseño, un monoplano cantilever de construcción mixta designado ANT-1, comenzó a materializarse. De rendimiento modesto, estaba concebido más como un banco de pruebas para las técnicas de construcción de aeronaves metálicas. El ANT-1 volaría por primera vez en octubre de 1923. Volaría intermitentemente en pruebas durante dos años, pero el motor se desgastó gradualmente, por lo que fue retirado. En lugar de desguazar el avión, Tupolev colgó el ANT-1 del techo del taller de ensamblaje. Permanecería en exhibición como tal hasta la Segunda Guerra Mundial, cuando se perdió en la confusión.
AK-1 de Aleksandrov-Kalinin
A principios de la década de 1920, TsAGI había estado investigando diversas secciones de perfil aerodinámico grueso y buscaban un avión práctico para verificar sus cálculos. El AK-1 que tomaría forma era un monoplano sencillo de ala alta, propulsado por un solo motor en el morro. Además de la sección de perfil aerodinámico grueso diseñada por TsAGI, el AK-1 se construyó utilizando nuevas técnicas experimentales de bajo coste y con capacidad para dos pasajeros. Las pruebas de vuelo comenzaron en febrero de 1924 y continuaron hasta junio de ese mismo año. Tras el éxito de las pruebas, se utilizó como avión de pasajeros y, ocasionalmente, como avión de propaganda.
Túpolev ANT-2
Tras el éxito del ANT-1, TsAGI encargó a Tupolev y a su equipo la creación de un avión totalmente metálico. El ANT-2, como se le denominó, era un monoplano cantilever de ala alta fabricado con una aleación de duraluminio de desarrollo nacional. Un fuselaje triangular profundo le otorgaba resistencia estructural, a la vez que proporcionaba espacio para dos pasajeros (y un piloto) en su interior. El ANT-2 despegó en mayo de 1924. Inicialmente se le detectó inestabilidad, pero tras algunos cambios en la cola, su manejo fue satisfactorio. Desafortunadamente, la escasez de materiales impidió la producción del ANT-2. El ANT-2 estaba propulsado por un motor Bristol Lucifer de fabricación extranjera, y no existían motores nacionales adecuados para sustituirlo, por lo que nunca tuvo un uso significativo más allá de las pruebas.
Cheranovsky BICh-3
En 1921, Boris Cheranovsky presentó una propuesta para el diseño experimental de un ala volante parabólica a TsAGI. Aunque al principio se encontró con incredulidad y resistencia, TsAGI apoyaría la propuesta después de que los estudios en túnel de viento demostraran que el ala volante podía volar. Dos planeadores, el BICh-1 y el BICh-2, se presentarían para pruebas en 1924, ambos con diseños parabólicos anchos con la cabina integrada en un estabilizador vertical de mayor tamaño. El BICh-1 era bastante rudimentario, pero el BICh-2 tuvo un buen rendimiento, convirtiéndose en el primer avión de ala volante del mundo. Tras las pruebas de planeadores que validaron el diseño parabólico, Cheranovsky se propuso crear un prototipo motorizado, denominado BICh-3. El BICh-3 era una simple conversión del planeador BICh-2 con un motor de 18 hp instalado en el morro. Las pruebas comenzaron en 1926. Al principio se detectaron problemas de estabilidad, pero el manejo era satisfactorio y, tras algunas modificaciones menores, el BICh-3 se volvió seguro para volar. El programa de pruebas parece haber transcurrido sin incidentes, pero el BICh-3 allanaría el camino para un mayor desarrollo de alas voladoras.
Cheranovsky BICh-7
Tras el éxito del BICh-3, Cheranovsky comenzó a trabajar en dos nuevos proyectos de alas volantes. El primero, el BICh-5, iba a ser un bombardero bimotor, pero se canceló antes de que concluyeran las pruebas en el túnel de viento. Sin embargo, elementos del diseño del BICh-5, incluyendo las superficies de control inferiores estilo Junkers, se trasladarían al BICh-7, diseñado como un avión de turismo biplaza mucho más práctico. En su diseño original, el BICh-7 era aproximadamente 1,5 veces más grande que el BICh-3. Los timones se ubicaban en las puntas de las alas, las cabinas abiertas en tándem se ubicaban a lo largo de la línea central y el tren de aterrizaje constaba de dos patines en las puntas de las alas y una sola rueda principal. Sin embargo, las pruebas de vuelo de 1929 tuvieron resultados decepcionantes, ya que el BICh-7 apenas podía despegar. Para salvar el diseño, Cheranovsky dedicó varios años a reconstruir el BICh-7 como el BICh-7A. El nuevo avión utilizaba un timón integrado en las cabinas (que ahora estaban cerradas), al igual que los diseños anteriores, y se empleó un tren de aterrizaje convencional. Volviendo a volar en 1932, el BICh-7A tuvo un rendimiento mucho mejor. Seguían presentándose problemas con las vibraciones del motor y la pérdida excesiva de velocidad en los virajes, pero unas ligeras modificaciones en los elevones mitigaron los problemas más graves.
Kamov-Skrzhinski KASKR-½ “Krasny Inzhener”
Inspirado por las exitosas pruebas de autogiros realizadas por Juan de la Cierva, un equipo de ingenieros bajo el mando de Nikolay Kamov se propuso crear su propio autogiro. Utilizando un entrenador Avro 504K como base, el KASKR-1 sustituyó el ala superior por un rotor de cuatro palas y modificó el tren de aterrizaje. Al ser el primer avión de este tipo en Rusia, las pruebas no estarían exentas de problemas. En la primera prueba de rodaje del KASR-1, el rotor perdió el equilibrio y seccionó la cola. Se reconstruyó con una cola más larga y baja, pero surgieron problemas de control cuando finalmente comenzaron las pruebas de vuelo en septiembre de 1929. La resistencia asimétrica del rotor costó un tiempo acostumbrarse, y el avión siempre tenía poca potencia. Tras su accidente en octubre, Kamov lo reconstruiría con un nuevo motor con más del doble de potencia. Denominado ahora KASKR-2, realizaría unos 90 vuelos de prueba más. En 1931, se presentó con éxito a los líderes del Partido, lo que sentó las bases para el futuro desarrollo del autogiro.
Vinogradov Igrado 3B/M
A finales de la década de 1920, el veterano piloto Ivan Vinogradov concibió un concepto inusual para una aeronave modular. Con el nombre de Igrado 3B/M, la aeronave debía ser capaz de servir como monoplano o biplano, con un tren de aterrizaje fácilmente desmontable para permitir su uso con esquís o flotadores. El fuselaje delantero era íntegramente de aluminio, mientras que las alas eran de madera con revestimiento de tela y la cola también de madera. El Igrado sería pilotado por el propio Vinogradov en 1931, pero pronto se descubrió que, incluso en la configuración biplano, el motor de 60 CV lo dejaba terriblemente corto de potencia. Se planeó instalar un motor más potente, pero el proyecto se abandonó tras sufrir daños en un aterrizaje accidental.
Los cazas con cañón sin retroceso
Con las ametralladoras de calibre de fusil, estándar en los cazas de la década de 1920, casi obsoletas, la VVS buscaba un nuevo armamento estándar a finales de la década. Mientras tanto, Leonid Kurchevsky desarrollaría un nuevo concepto de fusil sin retroceso con calibres que iban desde los 37mm hasta los 420 mm. Un cañón en particular, el APK-4 de 76 mm, captaría la atención de la VVS, que buscaba crear un caza basado en este arma para tareas antibombarderos. El proyecto se asignaría a dos oficinas de diseño. Grigorovich fue el primero en comenzar a trabajar, con la asignación en el verano de 1930, mientras que Tupolev lo siguió poco después. Al principio, el programa fue sumamente secreto, tanto que el caza de Grigorovich utilizaba una designación inexistente en el alfabeto cirílico (Z). Sin embargo, para cuando Tupolev comenzó a trabajar, la seguridad se había relajado lo suficiente como para que se reanudaran las designaciones regulares. En cualquier caso, el programa de fusiles sin retroceso sería un fracaso estrepitoso. Los problemas de fiabilidad plagaron las armas, y su baja velocidad inicial las hacía inútilmente imprecisas. El programa APK se abandonó en 1936, y su diseñador fue arrestado y ejecutado al año siguiente.
Sukhoi I-4 APK-4
Aunque las plataformas dedicadas al APK-4 volarían a mediados de 1931, se decidió montar dos cañones DRP-76 en un caza I-4 como banco de pruebas. A finales de 1931, se convirtió un solo I-4, y los ingenieros instalaron un cañón bajo la sección exterior del ala superior para realizar pruebas en tierra. Los disparos de prueba comenzaron en diciembre de ese año, y el I-4 realizó con éxito disparos de prueba contra objetivos terrestres. Desafortunadamente, durante uno de los disparos, uno de los cañones explotó, dañando gravemente la aeronave. A pesar del catastrófico fallo del DRP-76, el I-4 fue reparado y volvió a estar en servicio, sirviendo como banco de pruebas para varios rifles sin retroceso del APK hasta finales de 1935.
Grigorovich IZ
El
proyecto de caza con fusil sin retroceso de Grigorovich se denominaría
IZ. Se trataba de un monoplano convencional de ala corrugada, cuya única
característica distintiva de los cazas contemporáneos era el fusil sin
retroceso alojado bajo cada ala. Para acelerar el desarrollo,
Grigorovich adoptó gran parte del diseño de otras aeronaves. El fuselaje
delantero provenía de un I-5, aunque se eliminó una de las dos
ametralladoras de calibre de fusil, mientras que el resto era un diseño
completamente nuevo. Una cola monocasco de duraluminio contaba con un
estabilizador vertical elevado para mantener las superficies
horizontales alejadas de la ráfaga de los cañones, y las alas rectas y
corrugadas estaban reforzadas para alojar los fusiles APK. Los cañones
instalados originalmente eran dispositivos monotiro bastante sencillos,
pero serían reemplazados por APK-4 multitiro en aeronaves de series
posteriores.
El IZ voló por primera vez en el verano de 1931, requiriendo pequeños cambios en la cola para ser considerado aceptable. Las pruebas, en general, fueron satisfactorias, y para 1933 se había encargado un lote de preproducción de 21 y 50 aviones de producción. Los aviones de producción se diferenciarían del prototipo en que utilizaban un anillo Townend en lugar del carenado del I-5 y estructuras de madera en el ala en lugar de metal. Desafortunadamente, las pruebas de servicio resultaron deficientes. Los diversos problemas con los fusiles APK afectaron al IZ y, con solo una ametralladora como armamento y un rendimiento modesto, no podía ser aceptado para el servicio sin los cañones. El IZ fue aceptado para el servicio en 1935, pero solo después de la sustitución de los cañones APK-4 originales por los APK-11 de 37 mm. Dado que los 50 aviones de producción ya se habían completado con el APK-4 montado, las conversiones se realizarían cuando los aviones llegaran a sus unidades. El servicio del IZ fue breve y sin incidentes. Unos pocos I-Z participaron en el programa de caza parásito Zveno, pero la mayoría solo tuvo una breve carrera con unidades de primera línea antes de ser reemplazados por el I-16.
Túpolev ANT-23/I-12
Tupolev adoptó un enfoque completamente diferente para su caza sin retroceso, denominado I-12. Con un diseño de doble brazo en contrapeso, el I-12 incorporó los cañones APK-4 en la estructura del brazo de cola. El piloto se sentaba en una cabina abierta en una góndola central con un motor Bristol Jupiter a proa y a popa, y una cola convencional de un solo timón extendida hasta la parte trasera del avión. Tras despegar a finales de 1931, las pruebas del I-12 resultaron deficientes. No superó las pruebas de fábrica, en parte debido a la enorme resistencia aerodinámica que proporcionaba el revestimiento corrugado y el tren de aterrizaje fijo y alto (necesario para dar a la hélice trasera una distancia al suelo). El motor trasero tenía un rendimiento deficiente, ya que se encontraba en la estela de la hélice delantera, y el piloto no tenía forma de saltar en paracaídas, ya que no existía un sistema de parada de emergencia para el motor trasero. En mayo de 1932, tuvo lugar la primera prueba en vuelo de los cañones APK-4, que finalizó con la explosión de uno de ellos. El avión aterrizó sin problemas, pero permaneció en tierra durante un tiempo mientras se reparaba y perfeccionaba. Finalmente, las pruebas de vuelo se detuvieron en septiembre de 1932. Los refinamientos continuaron hasta 1933, pero el programa se canceló ese año antes de que se pudiera completar el segundo prototipo.
TsAGI 2-EA
Tras el relativo éxito de los experimentos de autogiro de Kamov, TsAGI comenzó a trabajar en un banco de pruebas para examinar todos los elementos de su construcción. Designado como 2-EA, el avión era un diseño completamente nuevo con fuselaje de tubo de acero, alas de madera y revestimiento de tela. Al igual que el autogiro de Kamov, tenía una tripulación de dos personas, pero utilizaba un motor Gnome-Titan mucho más potente. Se tuvo especial cuidado en proteger la cola de las palas del rotor, con timones montados en una cola doble bastante corta, bien separados del rotor. Las pruebas comenzaron en 1931. Tuvo un buen rendimiento y las completó sin incidentes antes de ser transferido al grupo aéreo de propaganda "Máximo Gorki".
Vakhmistrov/Tupolev Zveno 1
En 1931, Vladimir Vakhmistrov comenzó a trabajar en un programa de cazas parásitos. Denominado "Zveno", el proyecto buscaba proporcionar a los cazas un medio para operar más allá de su alcance y carga útil normales, tanto para escoltar a bombarderos de largo alcance como para permitirles realizar bombardeos en picado con cargas útiles muy superiores a su capacidad normal. El primero de los proyectos Zveno se centró en el bombardero TB-1 de Tupolev. Con el TB-1 como portaaviones, un I-4 se enrollaba sobre cada ala mediante una rampa y se acoplaba al bombardero mediante tres esclusas. Estas esclusas eran controladas por los pilotos de los cazas, lo que permitía que se soltaran durante el vuelo. Para el despegue, los tres aviones utilizaban sus motores, lo que ayudaba al TB-1 a compensar el peso adicional. Las pruebas de vuelo comenzaron en diciembre de 1931. Aunque uno de los I-4 tuvo problemas para soltarse debido a la deformación del mecanismo de bloqueo, ambos cazas despegaron y se soltaron con éxito. Las pruebas continuaron hasta 1932 y, una vez concluidas, el VVS recomendó la producción en serie de aviones estilo Zveno.
Cheranovski BICh-11/RP-1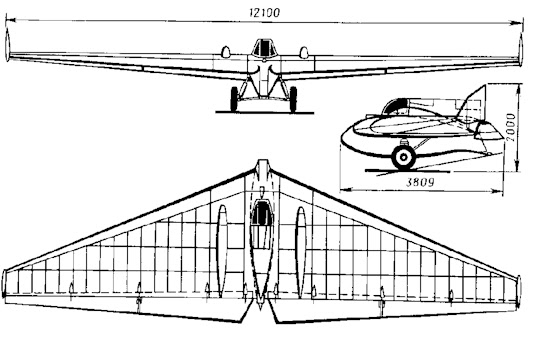
El siguiente diseño de ala volante de Cheranovski sería notable por ser el primer avión propulsado por cohetes diseñado específicamente para este propósito. El BICh-11 compartía las superficies de control y los timones de punta de ala del BICh-7, pero era un diseño considerablemente más compacto, con un fuselaje bajo y un borde de ataque recto. A ambos lados de la cabina se encontraban dos carenados para motores cohete. Desafortunadamente, el BICh-11 nunca volaría con el motor cohete previsto. Los motores cohete OR-2 en desarrollo se consideraron demasiado peligrosos para montarlos en una aeronave, por lo que las pruebas de vuelo del BICh-11 comenzarían en 1932 con un vuelo planeado lanzado por catapulta. Las pruebas finalmente progresaron al vuelo propulsado, con un pequeño motor de 35 hp instalado. Sin embargo, a pesar de la exitosa demostración del motor OR-2 en 1933, el BICh-11 nunca lo montaría.
Túpolev ANT-25
Por recomendación de Kliment Voroshilov, en diciembre de 1931, Tupolev recibió el encargo de desarrollar un avión experimental de largo alcance. Con la intención de batir récords de distancia, el ANT-25 resultante fue un monoplano de voladizo con una envergadura de 34 m. Un solo Mikulin M-34 propulsaba la aeronave, mientras que las espaciosas alas y el fuselaje se llenaban con tanques de combustible, lo que significaba que el combustible representaba más de la mitad del peso de la aeronave al despegar. La alta relación de alargamiento de las alas requería una atención especial, lo que llevó a TsAGI a nuevas investigaciones sobre el aleteo para garantizar la seguridad del diseño. En caso de amerizaje forzoso en el mar, el ANT-25 también estaba equipado con bolsas de aire para mantenerse a flote. El ANT-25 volaría por primera vez en 1933, pero los intentos de récord tendrían que esperar hasta el año siguiente, mientras concluían las pruebas de fábrica. El primer vuelo de este tipo llevó al ANT-25 a un recorrido de 12 000 km, manteniéndose en el aire durante 75 horas. Más tarde, batiría el récord de vuelo en línea recta, sobrevolando más de 9.000 km desde Moscú hasta Portland, Oregón. Los vuelos récord continuaron hasta mediados de la década. El VVS consideró militarizar el diseño, pero se descubrió que era extremadamente poco práctico: lento, torpe y con poca potencia, el diseño del ANT-25 no era adecuado para misiones de combate, incluso después de modificaciones significativas.
Kalinin K-7
A finales de la década de 1920, Kalinin concibió el concepto de un avión comercial masivo con capacidad para 120 personas, comenzando a trabajar en él como el K-7. El concepto captó rápidamente la atención del VVS, por lo que pronto se trabajó en una variante de bombardero. La enorme carga útil proyectada para el K-7 no sería, ni mucho menos, su única característica distintiva. El diseño consistía en un ala elíptica gruesa de 53 metros que transportaría la mayor parte de la carga útil y la tripulación, con una cola de doble brazo que se extendía hacia atrás y siete motores AM-34F (seis en el borde de ataque y uno en el de fuga). En lugar del tren de aterrizaje convencional, dos grandes cápsulas se extendían bajo cada ala, cada una con tres ruedas. Como bombardero, estas cápsulas también albergaban a dos artilleros. La potencia de fuego total como bombardero ascendía a ocho cañones de 20 mm y ocho ametralladoras en 12 posiciones, dispuestas de tal manera que cada ángulo estuviera cubierto por al menos tres cañones. La carga útil también era pesada, con espacio para hasta 6.000 kg de bombas. El K-7 realizó su primer vuelo en agosto de 1933, pero las pruebas se suspendieron tras revelarse en el primer vuelo peligrosos problemas de estabilidad y vibración. Esto se "solucionó" acortando y reforzando la cola, pero los problemas de vibración persistieron, lo que finalmente provocó el accidente del prototipo en su séptimo vuelo de prueba. Aunque se habían encargado dos prototipos más, el proyecto se canceló en 1935 antes de que pudieran completarse.
Bartini Stal-6
Poco después de ser nombrado líder de un equipo de diseño, Bartini se propuso desarrollar una aeronave increíblemente avanzada. Diseñado en torno a un motor Curtiss Conqueror, el Stal-6 se hizo lo más compacto y limpio posible. La cabina se alineó con el fuselaje y un sistema de refrigeración por evaporación en el revestimiento redujo la resistencia, mientras que el peso se redujo mediante el uso de un tren de aterrizaje monopié y una estructura extremadamente ligera. Al despegar en el otoño de 1933, el Stal-6 validó de inmediato todos los conceptos novedosos que Bartini había incorporado al diseño. La configuración poco convencional del tren de aterrizaje tuvo un rendimiento tan bueno como el tren de aterrizaje estándar, y las pruebas demostraron que el Stal-6 podía alcanzar una velocidad máxima de 420 km/h, 150 km/h más rápido que los cazas contemporáneos. Llegando en un momento en que otros OKB afirmaban que tales velocidades eran imposibles con la tecnología contemporánea, el Stal-6 fue revolucionario. Con el diseño ampliamente probado, Bartini progresó al Stal-8, una versión militarizada más práctica del diseño.
Bartini Stal-8
Desarrollado a partir del Stal-6, el Stal-8 de Bartini era una versión ligeramente mayor de su avión de pruebas, diseñado para servir como caza. La cabina se elevó para ofrecer al piloto un campo de visión razonable y se añadieron dos ametralladoras de 7,62 mm en el morro. Se mantuvieron el novedoso tren de aterrizaje, sistema de refrigeración y construcción, aunque el peso en vacío aumentó en casi 300 kg. Para compensar este peso adicional, el Stal-8 utilizaría el motor M-100, derivado del Hispano-Suiza 12Y, que proporcionaba más potencia que el Curtiss Conqueror original. Desafortunadamente, a pesar del éxito del Stal-6, recibió críticas por la vulnerabilidad de su sistema de refrigeración. Con la esperanza de contrarrestar las críticas, Bartini probó el Stal-6 con daños simulados en el sistema de refrigeración para vuelos de hasta media hora, a la vez que rediseñó el sistema del Stal-8 para hacerlo más robusto. Desafortunadamente, la política pareció interferir en el proceso. El OKB de Bartini formaba parte de GVF (predecesora de Aeroflot), que mostró escaso interés en el diseño, y otros departamentos interesados no estuvieron dispuestos a intervenir para preservar el proyecto, sobre todo con cazas más convencionales como el I-15 y el I-16 ya en producción. Finalmente, el Stal-8 se canceló con el prototipo completado al 90%, debido a que el sistema de refrigeración era demasiado vulnerable.
Instituto de Aviación de Jarkov KhAI-4
A principios de la década de 1930, KhAI comenzó a experimentar con aviones sin cola. Como demostrador, produjeron el KhAI-4, un diseño biplaza sin cola propulsado por un motor propulsor de 100 CV. Una novedad en la URSS, contaba con un tren de aterrizaje triciclo con rueda de morro orientable. A diferencia de las obras de Cheranovsky, el KhAI-4 era menos un ala volante y más un avión sin cola con un fuselaje y alas diferenciados. Las pruebas comenzaron en el verano de 1934, encontrando numerosos problemas. El par del motor dificultaba el manejo, y el corto brazo de momento de los elevones hacía que la rotación en el despegue solo fuera posible a velocidades muy altas. Peor aún, el motor, montado en altura, producía un momento de morro hacia abajo, lo que dificultaba el ascenso. Finalmente, el programa finalizó después de que el KhAI-4 fuera declarado demasiado peligroso para volar. El concepto básico de un avión sin cola se había probado, pero el KhAI-4 en sí no era en absoluto práctico ni seguro.
Chetverikov SPL
En 1931, Chetverikov comenzó a trabajar en un nuevo e interesante proyecto para desarrollar un hidroavión capaz de transportarse a bordo de un submarino. Diseñado alrededor de un tubo "hangar" de 7,5 m de largo y 2,5 m de ancho, el nuevo avión debía ensamblarse fácilmente en no más de cinco minutos. Como era de esperar, el SPL resultante tenía un diseño rudimentario, más parecido a un avión deportivo civil que a uno militar. La cola, el motor y las alas se desmontaban para su almacenamiento; la cola y los motores se montaban separados de un pequeño casco sobre puntales de soporte. Cumplir con los requisitos de tamaño y ensamblaje se tradujo en una baja potencia del motor (100 hp) y unas superficies de cola reducidas. Para reducir la resistencia aerodinámica, la tripulación, compuesta por dos personas, se sentaba a baja altura en el fuselaje, lo que resultaba en un campo de visión muy reducido para el observador. El primer prototipo carecía de mecanismo de plegado de alas, destinado a servir como banco de pruebas para el resto del diseño. Volaría a mediados de 1934, seguido por un prototipo más pequeño y refinado (con plegado de alas incluido) en diciembre de ese mismo año. Las pruebas duraron hasta agosto de 1935. Si bien el SPL presentaba numerosos defectos, cumplía con todos los requisitos de diseño. Sin embargo, las autoridades estatales pronto se dieron cuenta de que dicho diseño quedaría obsoleto rápidamente, por lo que no se ordenó su producción. El SPL se convirtió en un objeto de propaganda, exhibiéndose en exhibiciones aéreas y estableciendo récords (principalmente de altitud) para su clase, mientras que el gobierno soviético abandonó el concepto de avión submarino.
Moskalev SAM-4
En 1933, Aleksandr Moskalev, de la Universidad de Vorónezh, comenzó a experimentar con el diseño de alas de alta velocidad. Con el objetivo final de crear una aeronave capaz de alcanzar velocidades supersónicas, Moskalev comenzaría con un demostrador subsónico. Designado como SAM-4, el avión tendría un ala ojival sin cola. Dos motores Hispano-Suiza de 760 hp impulsarían hélices contrarrotativas con palas en forma de cimitarra (destinadas a retrasar el inicio del flujo supersónico), y las placas terminales del timón se diseñaron para mejorar el manejo a baja velocidad y reducir los impactos negativos del ala de baja relación de aspecto. Para reducir la resistencia, la cabina debía estar alineada con el fuselaje y el piloto se colocaría en posición prona. El proyecto era ambicioso, con el objetivo de alcanzar una velocidad máxima de entre 900 y 1000 km/h. Desafortunadamente, cuando se presentó a las autoridades estatales en 1934, tuvo una mala acogida. Como Moskalev también estaba trabajando en otros proyectos en ese momento, el SAM-4 sería abandonado.
Cheranovksy BICh-14
Tras el éxito del BICh-7, Cheranovsky finalmente comenzó a trabajar seriamente en un ala voladora parabólica bimotor. Inicialmente, bajo la designación BICh-10, las pruebas a pequeña escala detectaron numerosos fallos en el diseño, por lo que se perfeccionó hasta convertirse en el BICh-14. Avanzando con respecto a trabajos anteriores, el BICh-14 contaría con una cabina de duraluminio y un tren de aterrizaje retráctil. Se instaló un único motor de 100 hp en el borde de ataque del ala, a ambos lados de la cabina, y se integró una pequeña cola vertical en el compartimento de la tripulación. Las pruebas de vuelo comenzaron a finales de 1934, con el diseño presentado al VVS. Desafortunadamente, se descubrió que el diseño tenía un manejo y una estabilidad deficientes, consecuencia de la ubicación del motor, un flujo de aire deficiente sobre la cola y un diseño deficiente de los elevones.
Vakhmistrov/Tupolev Zveno 2/3/5/6/7
Tras
la exitosa demostración del concepto Zveno en el TB-1, Vakhmistrov se
centró en el bombardero pesado TB-3, de mayor tamaño. El primer
experimento con el Zveno, el Zveno-2, se diferenciaba poco del concepto
original. Un I-5 se subía a cada ala mediante una rampa, mientras que un
tercero se subía al ala y se desplazaba a la fuerza hasta un soporte
sobre el fuselaje. Las pruebas del Zveno 2 comenzaron en agosto de 1934.
Si bien demostró con éxito su capacidad de despegar con cualquier avión
y desacoplarse en vuelo, tal como lo hacía el Zveno original, remontar
el tercer caza sobre el fuselaje era increíblemente engorroso, por lo
que, tras varias pruebas, el tercer I-5 se había convertido en un
elemento casi permanente del avión.
Más
tarde ese año, comenzaron los trabajos en el proyecto Zveno-3. Aunque
basado en el TB-3, el Zveno-3 adoptaría un enfoque completamente
diferente. En lugar de montar los cazas parásitos sobre las alas,
Vakhmistrov creó un soporte bajo cada ala para permitir el transporte de
dos I-Z. Dado que los cazas se asentaban lo suficientemente bajo como
para que su equipo tocara el suelo, se les equipó con un armazón
flotante para compensar los desniveles del terreno. Desafortunadamente,
este armazón flotante sería el que pondría fin al Zveno-3: en un vuelo
de prueba, el armazón no se bloqueó tras el despegue, lo que provocó que
uno de los I-Z se estrellara contra el ala. Aún suspendidos del
bombardero, los aparatos averiados se dispusieron a realizar un
aterrizaje de emergencia, pero al reducir la velocidad del bombardero,
el IZ dañado cayó al suelo, matando a su piloto. El último de los
experimentos con IZ Zveno se denominaría Zveno-5. Este proyecto
implicaba acoplamiento aéreo, con el TB-3 suspendiendo un trapecio bajo
el fuselaje al que se engancharía un IZ. Esta maniobra se demostró con
éxito en marzo de 1935, cuando los aviones se acoplaron a 1.000 m en lo
que sería el primer acoplamiento en el aire del mundo entre aviones de
ala fija.
A
mediados de 1935, se inició un nuevo proyecto Zveno. Utilizando la
misma disposición de anclaje bajo las alas que el Zveno-3, el Zveno-6
evitaría los peligrosos montajes flotantes utilizando I-16 con el tren
de aterrizaje retraído en tierra. En su primer vuelo en agosto de 1935,
el concepto funcionó a la perfección, aunque carecían de medios para
reatracar en vuelo. El Zveno-7 finalmente se convertiría en un medio
para que los I-16 se acoplaran de nuevo, pero el sistema no despegó
hasta finales de 1939 y nunca se puso en práctica. En cambio,
Vakhmistrov puso la mira en otro lugar. Un nuevo proyecto, conocido
simplemente como Aviamatka, volaría en noviembre de 1935, culminando
todos los proyectos Zveno anteriores. Se montaron dos I-15 sobre las
alas y dos I-16 suspendidos debajo de ellas, mientras que se añadió el
trapecio del Zveno-5 para permitir el atraque de un solo IZ en vuelo.
Sorprendentemente, el absurdo concepto no solo voló, sino que se probó
con éxito. Vakhmistrov esperaba que el Aviamatka sirviera de base para
un concepto de nave nodriza aerotransportada en el que una escuadrilla
de ocho I-16 pudiera atracar y reabastecerse con un TB-3, pero
lamentablemente el concepto nunca se materializó.
Aunque los objetivos más ambiciosos de Vakhmistrov nunca se materializaron, sus Zvenos sí entraron en combate. Un proyecto más conservador, llamado Zveno-SPB, se basó en los experimentos del I-16 para convertir el Zveno en una plataforma de ataque. Cada I-16 estaría equipado con un par de bombas FAB-250, lo que duplicaría con creces su capacidad estándar y aumentaría su alcance en un 80 %. La producción inicial comenzó en junio de 1940, con seis SPB convertidos utilizando bombas I-16 tipo 24. Se enviaron a Sebastopol, donde estaban estacionados al estallar la guerra al año siguiente. El SPB se libró de la masacre en el frente, participando en una campaña de bombardeo sorprendentemente agresiva a través del Mar Negro contra los yacimientos petrolíferos rumanos. Se realizaron unas 30 misiones del Zveno-SPB, atacando puentes estratégicos, oleoductos y refinerías en Rumania sin sufrir pérdidas. En una ocasión, cuatro I-16 lanzados desde el Zveno incluso se enfrentaron a dos Bf 109, causándoles la muerte. Desafortunadamente, la trayectoria del Zveno-SPB fue corta. Todos los aviones involucrados fueron superados por los cazas enemigos, y, con las fuerzas del Eje acercándose a Crimea, ya no quedaban recursos para realizar incursiones de hostigamiento sobre Rumanía. Algunas de las últimas incursiones del Zveno-SPB tenían como objetivo detener el avance enemigo atacando puentes en el Dniéper. Parece que este fue el último uso real del sistema en combate.
Grokhovsky G-39
Alrededor de 1932, el VVS inició un proyecto secreto para desarrollar un caza de embestida. Con el nombre en clave "Taran", el programa evaluó varias soluciones tripuladas y no tripuladas. La más exitosa fue el proyecto G-39 de Grokhovsky, iniciado en 1933. El G-39 era una aeronave inusual con una larga botavara que se extendía desde el morro. Dos cables de acero se extendían desde esta botavara hasta las puntas de las alas, y los bordes de ataque de las alas se reforzaban en caso de fallo de los cables. El motor se ubicaba en un sistema de propulsión detrás de la cabina y, en lugar de usar cola, el G-39 tenía timones montados cerca de las puntas de sus alas en flecha de 38 grados. Debido al peligro proyectado por los cañones enemigos, el parabrisas se equipó con un escudo antibalas retráctil. Esta inusual aeronave se presentó en la primavera de 1935 para realizar pruebas. Desafortunadamente, no logró volar. El motor de 100 hp dejaba al avión con una potencia extremadamente baja, y su ubicación reducía la eficiencia de la hélice. Finalmente, el proyecto G-39 sería abandonado sin siquiera emprender vuelo.
Moskalev SAM-6
Como parte de su trabajo en aviones sin cola, Moskalev concibió un tren de aterrizaje de un solo punto. En lugar de esperar a tener listo el diseño final para comprobar si el nuevo concepto de tren de aterrizaje funcionaba, optó por construir un demostrador a pequeña escala, denominado SAM-6. El SAM-6 era un diseño sencillo sin cola, con un timón convencional y placas de punta de ala. Un pequeño motor de 65 CV se ubicaba en el morro, frente a una cabina abierta, y un único y gran puntal del tren de aterrizaje se colocaba bajo el fuselaje. Para mantener el equilibrio del avión, se colocaron pequeños estabilizadores en las placas de cola y punta de ala. Tras despegar en enero de 1935, el SAM-6 transcurrió sin incidentes. Voló con tren de aterrizaje con ruedas y con esquíes, lo que demostró la fiabilidad de su configuración.
Moskalev SAM-7
El éxito del demostrador SAM-6 permitió a Moskalev avanzar hasta su diseño a escala real. Designado como SAM-7, el avión era un caza biplaza sin cola, totalmente metálico. Al igual que el SAM-6 anterior, utilizaba una sola ala convencional con placas terminales, pero carecía de cola vertical; en su lugar, se colocaron timones en las placas terminales. Un motor M-34 de 750 hp se instaló en el morro impulsando una hélice de madera de cuatro palas, y se proporcionaron dos ametralladoras ShKAS para cada tripulante (dos sincronizadas para el piloto y dos flexibles para el artillero). A pesar de todo el esfuerzo invertido en la fabricación de un tren de aterrizaje monopié, el SAM-7 utilizó un tren retráctil convencional. El SAM-7 volaría en 1936. Aunque un centro de gravedad inusual sugeriría problemas de estabilidad, el SAM-7 era sorprendentemente estable. Sin embargo, las pruebas fueron muy limitadas, y la mayoría consistieron en rodajes a alta velocidad y algún que otro salto. El programa fue cancelado antes de que pudieran comenzar pruebas importantes, ya que los funcionarios declararon que los problemas aerodinámicos y estructurales no se habían resuelto.
Kalinin K-12
Kalinin, quien había estado trabajando en diseños sin cola desde 1934, produciría un bombardero experimental sin cola en 1936, designado como K-12. El K-12 era un diseño bimotor de tres tripulantes, equipado con dos ametralladoras defensivas en posiciones de morro y cola y un compartimento para bombas con capacidad para 500 kg. Las alas cónicas convencionales estaban equipadas con superficies de control estilo Junkers y placas terminales con timones, lo que le daba una apariencia inusual similar a la de un avión convencional sin la cola. El K-12 estaba equipado con tren de aterrizaje retráctil convencional, aunque la necesidad de proporcionar espacio libre para las hélices y una rueda de cola corta significaba que el K-12 permanecería con el morro muy alto en tierra. Kalinin trabajó extensamente para validar el diseño antes de que pudieran comenzar las pruebas a escala real, con un planeador a escala ½ que voló 100 veces antes de que el K-12 finalmente recibiera la autorización para volar. Despegó en otoño de 1936. Se observó que los timones de placa terminal tenían poca autoridad a bajas velocidades y se encontraron pequeños problemas de estabilidad, pero el diseño, en general, parecía validar el concepto de avión sin cola. La confianza era alta, y se ordenó la producción del diseño mientras el prototipo se pintaba con un patrón de plumas amarillas y rojas para un vuelo de prueba en Túshino en 1937. Sin embargo, todo el programa llegó a su fin cuando Kalinin fue víctima de las purgas de Stalin. La producción se interrumpió abruptamente, y el avión nunca entró en servicio.
Kalinin K-15
El objetivo final de los diseños sin cola de Kalinin era el K-15, de aspecto sorprendentemente moderno. El K-15 debía aprovechar la experiencia previa con diseños sin cola, así como la tecnología emergente de cohetes, lo que idealmente le permitiría a Kalinin producir un avión de ala delta propulsado por cohetes. El K-15 era un diseño simple, con un ala delta muy inclinada y una cabina carenada en una aleta vertical. Con fines de investigación, se realizaron pruebas a pequeña escala con cohetes de pólvora y maquetas para refinar la disposición aerodinámica. Aunque el diseño nunca se materializaría, el extenso trabajo de Kalinin en diseños de deltas sin cola no tenía parangón en ningún otro lugar del mundo en aquel momento. Desafortunadamente, todo su trabajo se vio truncado cuando fue víctima de las purgas de Stalin en 1938. Su oficina de diseño se disolvió y el proyecto K-15 llegó a su fin.

















